Research
My research is in planning and tasking for multi-robot systems and autonomous agents. A common theme in my work is incorporating realistic models of the world into planning algorithms. Examples include energy consumption and communication models that are based on experimental work.
Current Research
My current work is focused on tasking for drone-UGV teams, path finding for multi-drone data collection, and decentralized multi-robot task allocation problems. A common theme in these works is to ensure that our planning algorithms produce not only quality solutions, but solutions that are feasible on our physical hardware and representative of what we see our robots doing in the real-world.
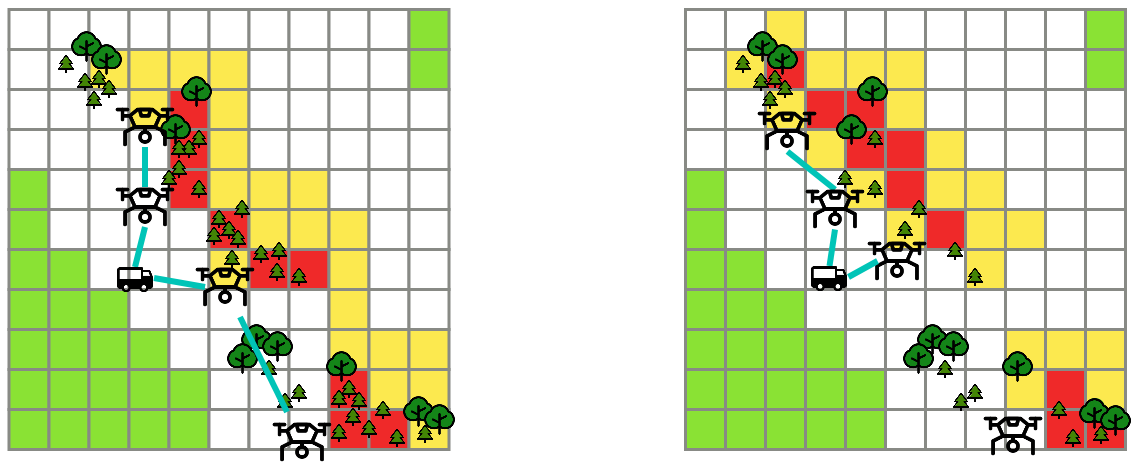
Drones are agile platforms that can be launched quickly and can easily traverse rough terrain. However, drones have limited onboard energy and cannot be deployed for extended periods of time. In contrast, Unmanned Ground Vehicles (UGVs) are robust, high endurance platforms that can cary a variety of sensors and operate for long periods of time, but lack the agility of drones. When combined, mixed drone-UGV teams could benefit from the strengths of each platform, where drones quickly accomplish tasks with agility and UGVs act as mobile recharging stations. This line of work looks at problems in planning and tasking for mixed drone-UGV teams, with a focus on energy sharing and communication.
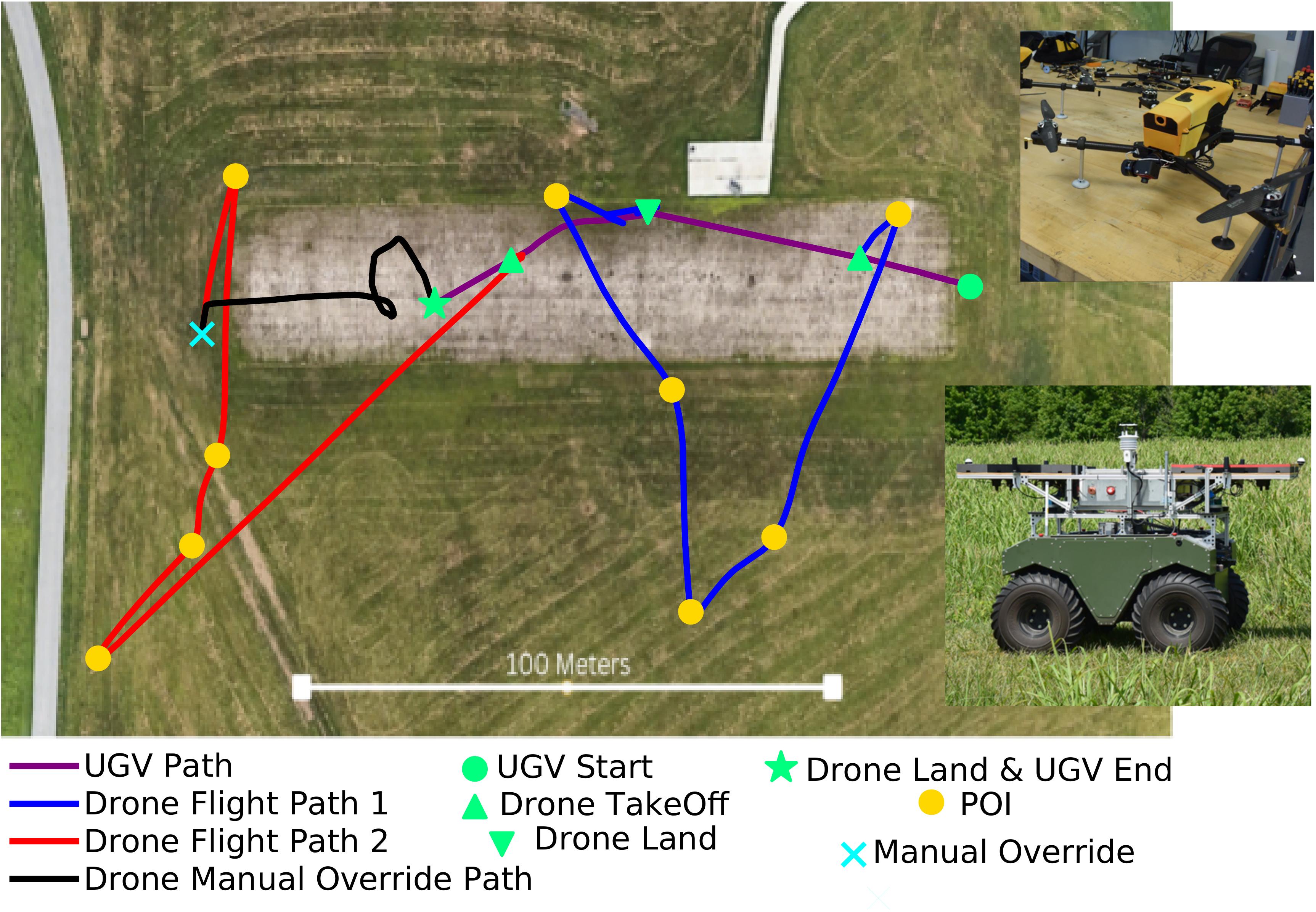
This work studies how to effectively deploy a team of drones to collect data from wireless sensors. We seek to combine offline multi-vehicle task planning with online adaptive behavior through a data-driven approach. A major aspect of this work is validating our solution through both simulations and field experiments on our physical testbed.

Some of the major challenges in task planning for multi-robot systems is properly managing robot resources (e.g. capabilities, energy, collaboration) while mitigating failures. This line of work seeks to design and validate algorithms for multi-robot task allocation problems while overcoming these challenges. We are particularly interested in decentralized approaches that can adapt to lossy communication links between robots.
Previous Work
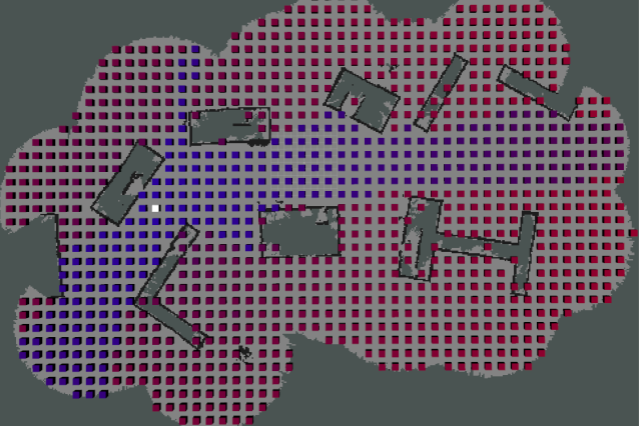
This work studied how to enable mobile agents to communicate effectively while avoiding malicious communication jamming. We explored various mapping techniques and looked at how to incorporate these maps in to the planning process for robot teams.
This work looked at how to incorporate speed-based drone energy models into path finding algorithms. We explored trade-offs in the speed-based energy model and evaluated how these tradeoffs could be leveraged to improve path finding. We also investigated the problem of launching drones from a ground vehicle that moves along a fixed trajectory. Applications for this work include maritime search and rescue, defense, security, and disaster response.

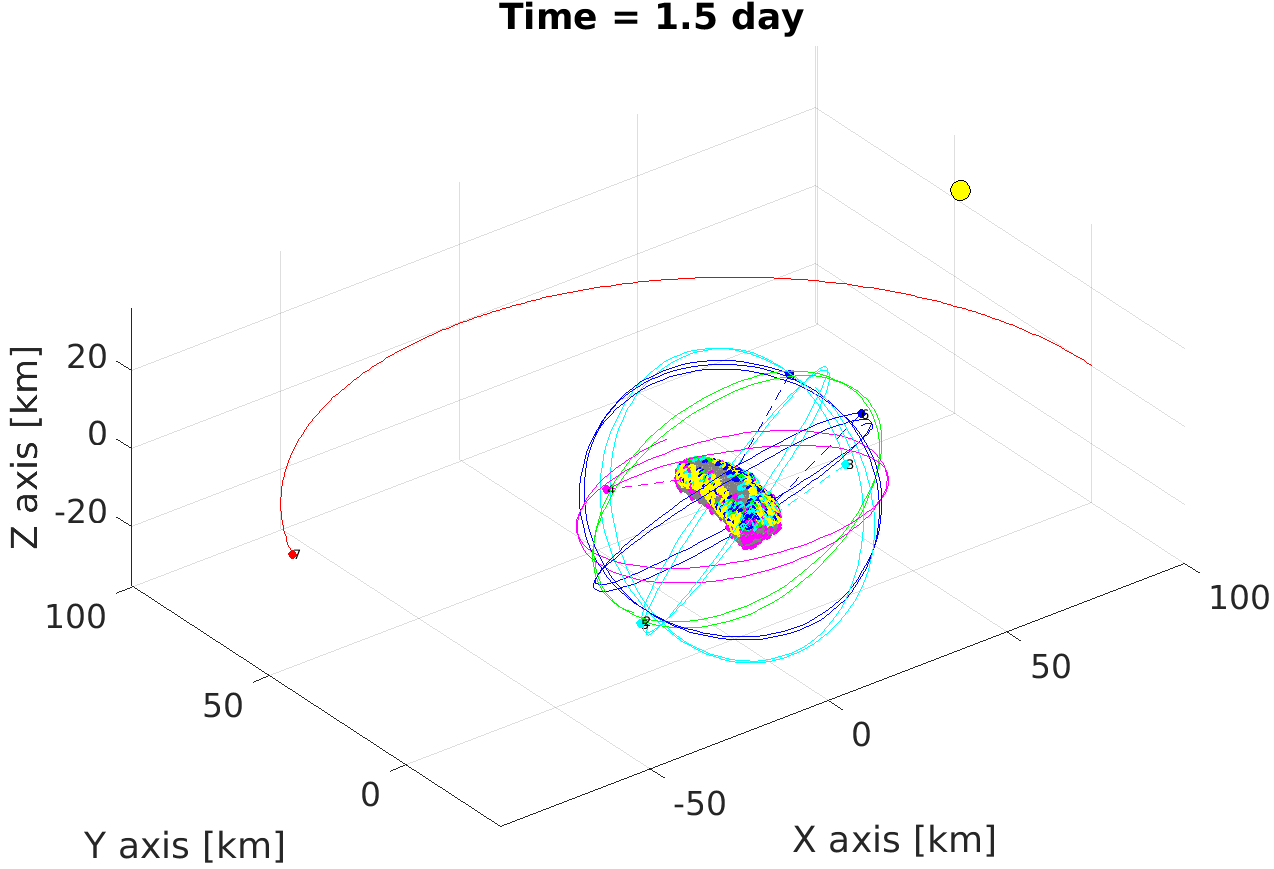
This project looked at how to integrate communication and control in swarms of UAVs. We used the NEAR-Shoemaker mission as a motivating case study and looked at how using a swarm of small satellites could be used to optimize the quantity and quality of data collected from the asteroid Eros.
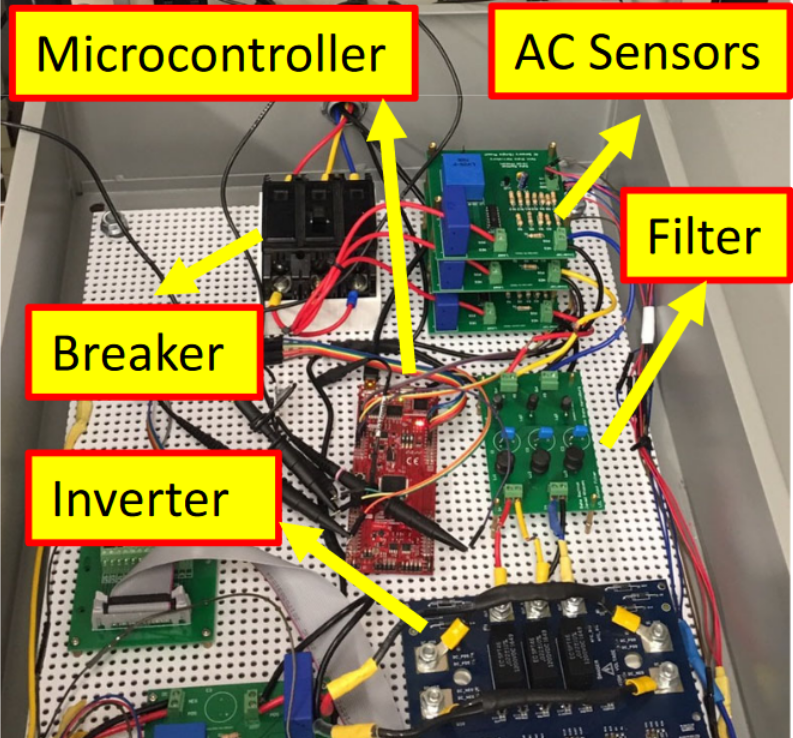
This work proposed a hardware implementation of demand side management (DSM) on an actual microgrid system to support grid needs. We proposed an algorithm for achieving DSM through load-leveling at the micro-level and implemented it on a physical microgrid. We conducted a simulated case study, based on the electrical load needs of small communities in Bangladesh, to demonstrate how our algorithm can be used to better balance electrical load demands.
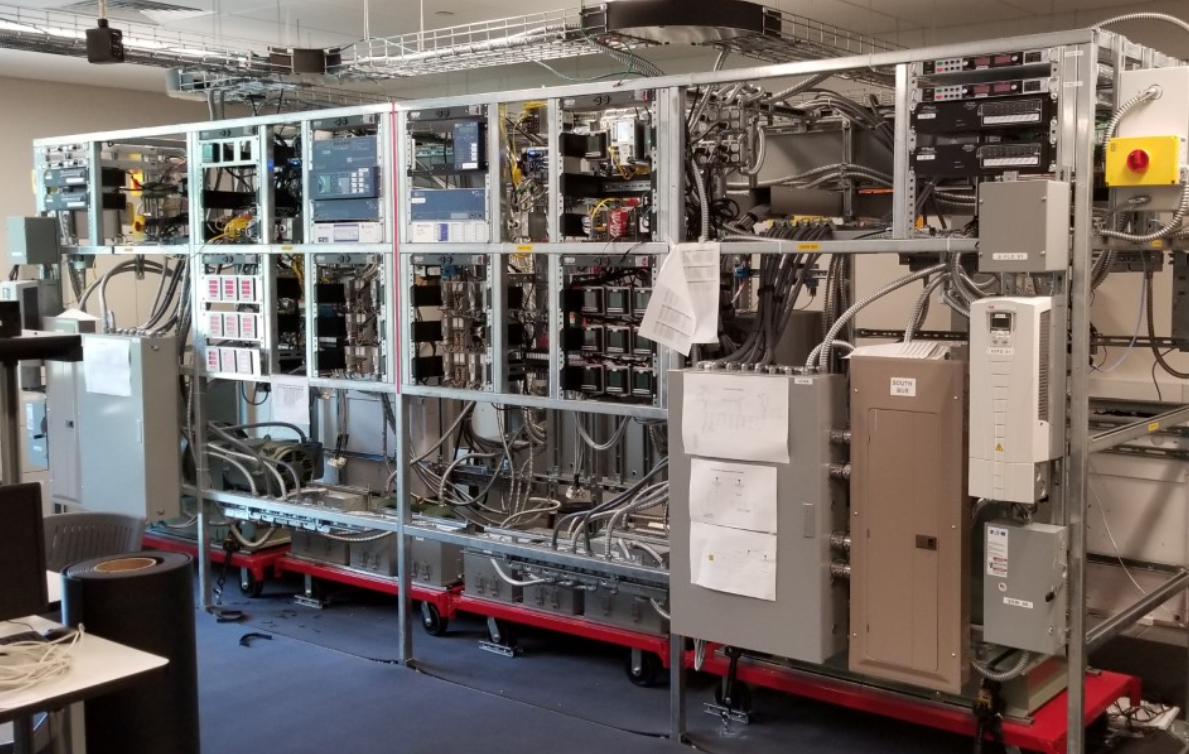
This work looked at how to implement Sinusoidal Pulse width modulation (sPWM) for single-phase and three-phase silicon carbide (SiC) converters using digital signal processing boards from Texas Instruments. We implemented our sPWM signal for SiC converters on a C2000 F28069M LaunchPad development kit and used it on a 3.5 kW three-phase SiC inverter experimental setup to validate the three-phase sPWM implementation.